
# Ch6
# 概念
图的顶点至少要有一个,边可以没有
顶点数:
边数:
- 有向图、无向图
- 简单图(不存在重复边、不存在到自身的边)、多重图
- 度、入度、出度
- 有向图所有顶点的入度和出度之和相等,且等于边数
- 路径、路径长度、回路
- 简单路径、简单回路(顶点不重复出现)
- 距离(从 u 到 v 的最短路径的长度,若不存在路径则为无穷大)
- 子图:由某几个顶点和某几条边组成的图
- 连通、连通图和连通分量
无向图中从 v 到 w 有路径存在,则 v 和 w 是连通的
若图中任意两个顶点都连通,则该图是连通图,否则是非连通图
无向图中的极大连通子图称为连通分量
有 个顶点的连通图中,至少存在 条边(边数小于 一定是非连通图)
个顶点的非连通图,最多有 条边
- 强连通图、强连通分量
在有向图中,若有一对顶点 v 和 w,从 v 到 w 有路径,从 w 到 v 有路径,则 v 和 w 是强连通的
若图中任意两个顶点都强连通,则该图是强连通图,否则是非强连通图
有向图中的极大强连通子图称为强连通分量
一个有向图有 个顶点,如果它是强连通图,则至少有 条边(环路)
- 生成树、生成森林
连通图的生成树是包含所有顶点的极小连通子图(若有 个顶点则生成树有 条边)
极大连通子图 vs 极小连通子图
极大连通子图要求连通且包含尽可能多的顶点和边,极小联通子图要求保持连通且边数最少
- 边的权、网和带权路径长度
带权图中,边有权值。路径上所有边的权值之和称为带权路径长度 - 完全图(也称简单完全图)
无向图,有 个顶点,有 条边的,称为完全(无向)图(顶点两两之间都有边)
有向图,有 个顶点,有 条边的,称为完全(有向)图 - 稠密图、稀疏图
当 时,可以视为稀疏图 - 有向树
一个顶点入度为 0,其他顶点入度均为 1 的有向图,称为有向树
# 图的存储及基本操作
# 邻接矩阵法
带权图:
1 |
|
无向图的邻接矩阵一定是对称的,所以只需要存上三角(或下三角)就行
对于无向图,邻接矩阵第 行非零元素的个数即为顶点 的度
对于有向图,邻接矩阵第 行非零元素的个数即为顶点 的出度,第 列非零元素的个数即为顶点 的入度
邻接矩阵适合稠密图
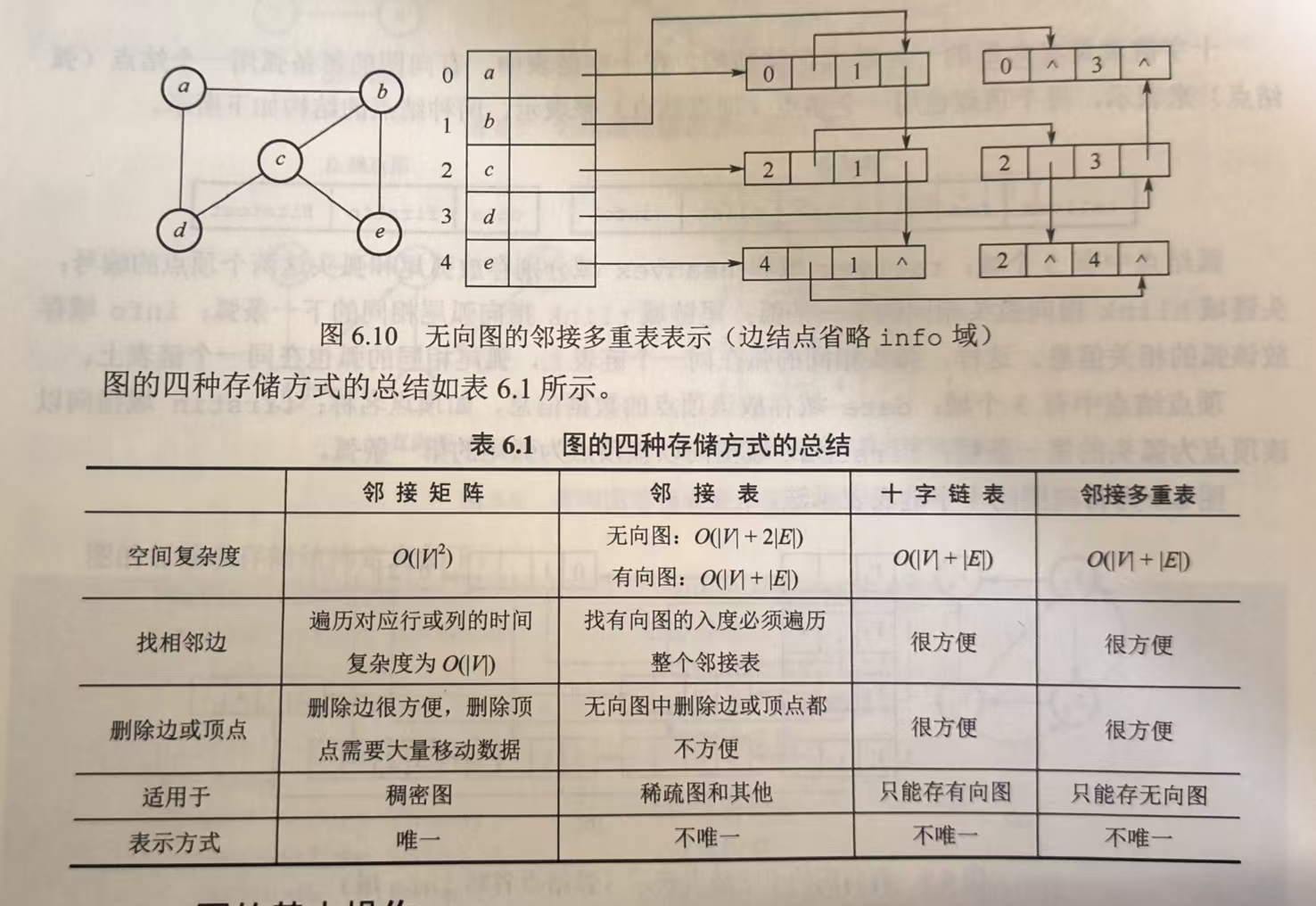
# 邻接表法
稀疏图适合用邻接表存储
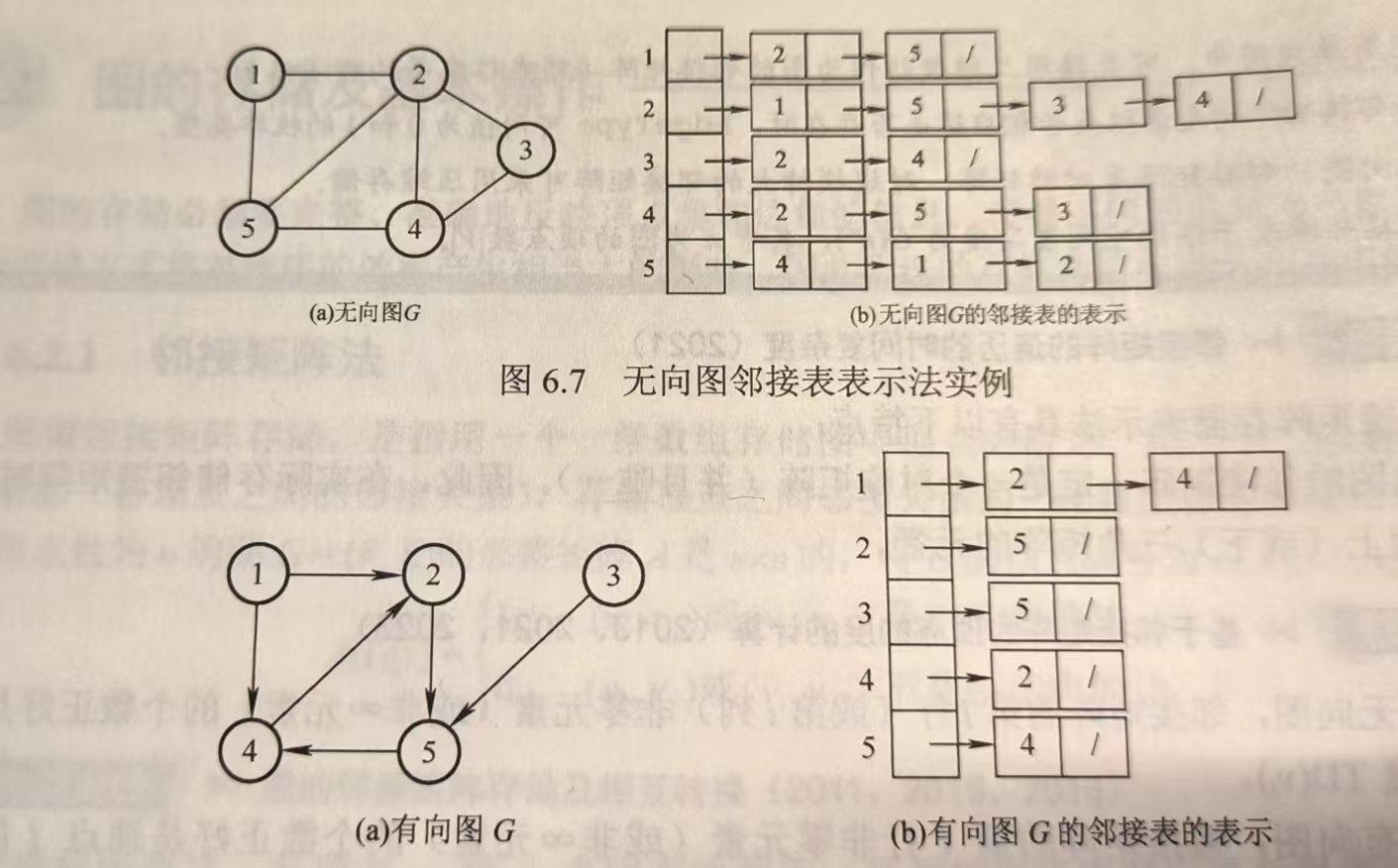
1 |
|
对于无向图,所需要的空间为;若为有向图,空间为
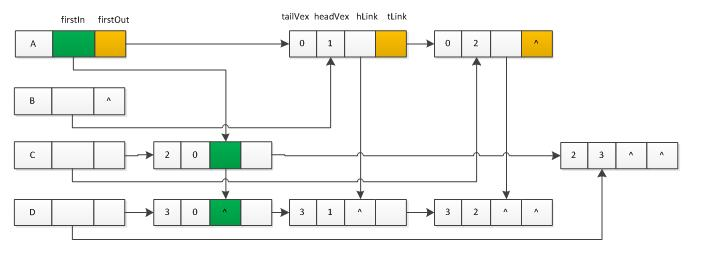
# 十字链表
有向图的一种链式存储结构
每条弧、顶点都用结点表示
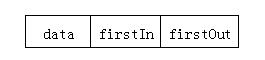
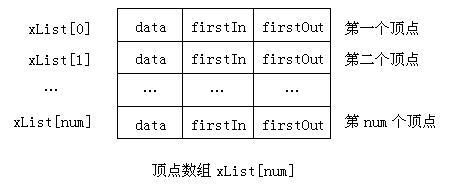
顶点结点
firstIn 表示进入这个结点的第一个弧节点, firstOut 表示出去这个结点的第一个弧节点
弧结点
tailVexh 和 headVex 存放弧尾和弧头在顶点数组的编号。 hLink 则表示指向弧头相同的下一条弧, tLink 则表示指向弧尾相同的下一条弧

王道这里的弧头指的是箭头的头部,弧尾指的是箭头的尾部,王道这一部分不知道哪个天才写的,纯误导人,直接看英语就行了
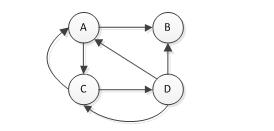
示例
# 邻接多重表
无向图的一种链式存储结构
边结点:
| ivex | ilink | jvex | jlink | (info) |
顶点结点:
| data | firstedge |
和十字链表差不多意思,只不过这个是无向图
# 图的基本操作
# 图的遍历
- BFS
用队列实现,入队的时候 visit,出队的时候检查邻接点
1 | void BFS(ALGraph G, int i){ |
时间复杂度:
1 | void DFS(MGraph G, int i){ |
时间复杂度:
- BFS 求
u到v的最短距离
在 BFS 基础上添加一个数组d,记录从u到v的最短距离;增加一个数组pre记录路径
1 | void BFS_MIN_Distance(ALGraph G, int u, int target) { |
- DFS
用栈实现
1 | void DFS(ALGraph G, int i){ |
时间复杂度:
1 | void DFS(MGraph G, int i){ |
时间复杂度:
如果是非连通图,则需要多次调用 DFS(再扫描一次 visit 数组,找到未访问的顶点然后继续调用 DFS)
# 图的应用
# 最小生成树 MST
最小生成树:从连通无向图中找出一棵树(包含所有 n 个节点和 n-1 条边),同时边的权重之和要最小
- Prim 算法
随便取一个根节点记作 visited,不断寻找 visited 节点和 unvisited 节点之间权重最小的边
初始的时候只有一个结点,从顶点开始每次找到和已有的结点距离最小的边,加入树中,直到树中顶点数等于顶点数(每次要保证树是连通的且没有回路)
时间复杂度:,适用于求稠密图的最小生成树 - Kruskal 算法
每次找到距离最短的边,加入树中,直到所有顶点都在一个连通分量上
1)创建一个队列,将边按权重排序,最小的在最上面;(2)从顶端不断 dequeue,如果符合不在同一棵树里就接受那条边
# 最短路径
-
Dijkstra 算法
有权图的单源最短路算法
求从源点到其他点的最短路径:每次选距离最近的点,更新源点到其他点的最短距离
一开始和其他点的距离全都初始化为INF,和自己的距离为 0,每次在 unvisited 的结点中找距离最小的 visit,然后看这个结点的邻接点,新的距离比旧距离小则更新
画一个表,分别是是否 visit、编号、距离和路径,每次取 unvisited 里最小的 -
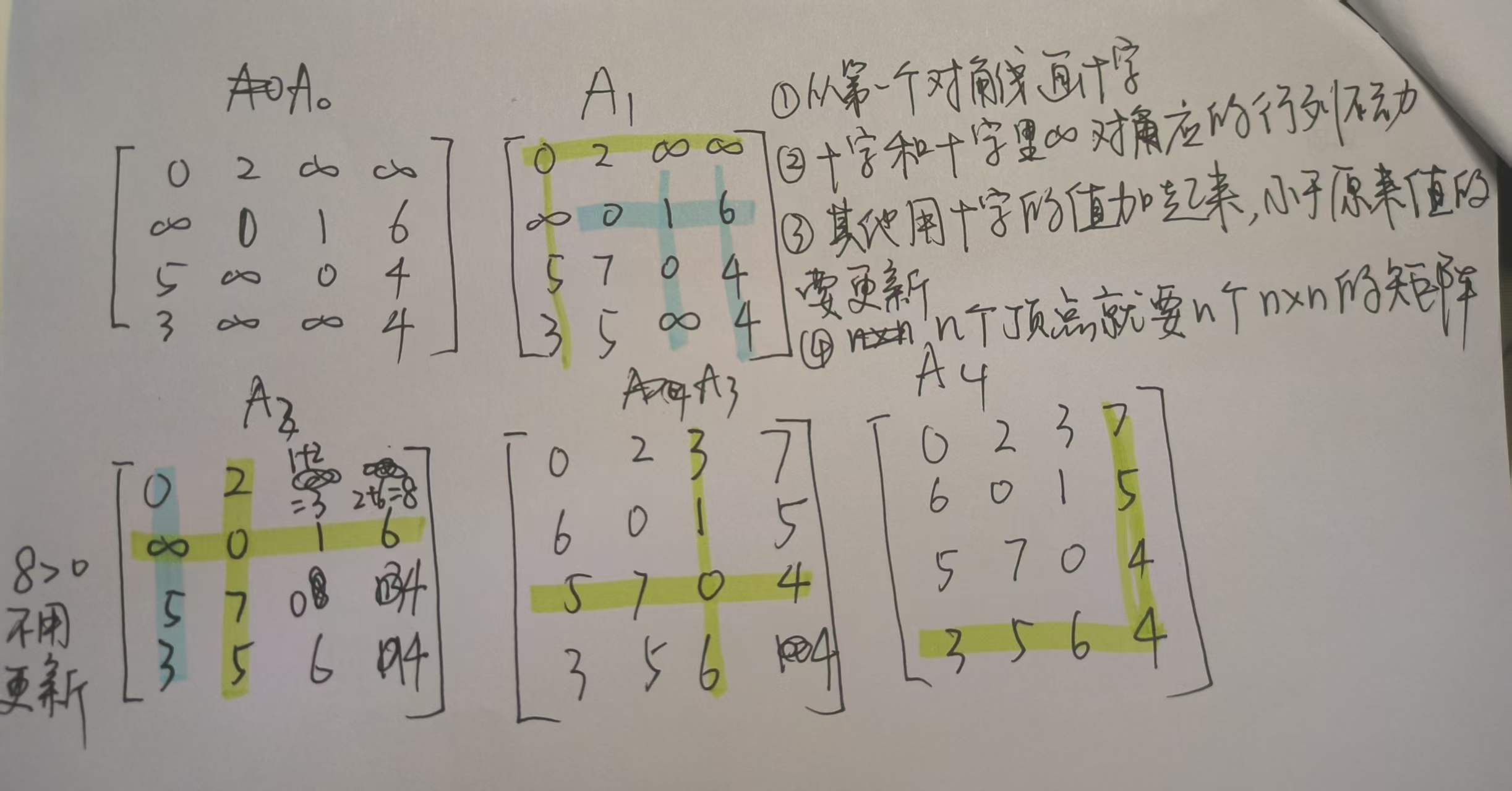
Floyd 算法
多源最短路算法,求所有顶点之间的最短路径
递归产生一个 n 阶方阵序列
直接看例子:
![]()
路径就是加起来的两个值的路径
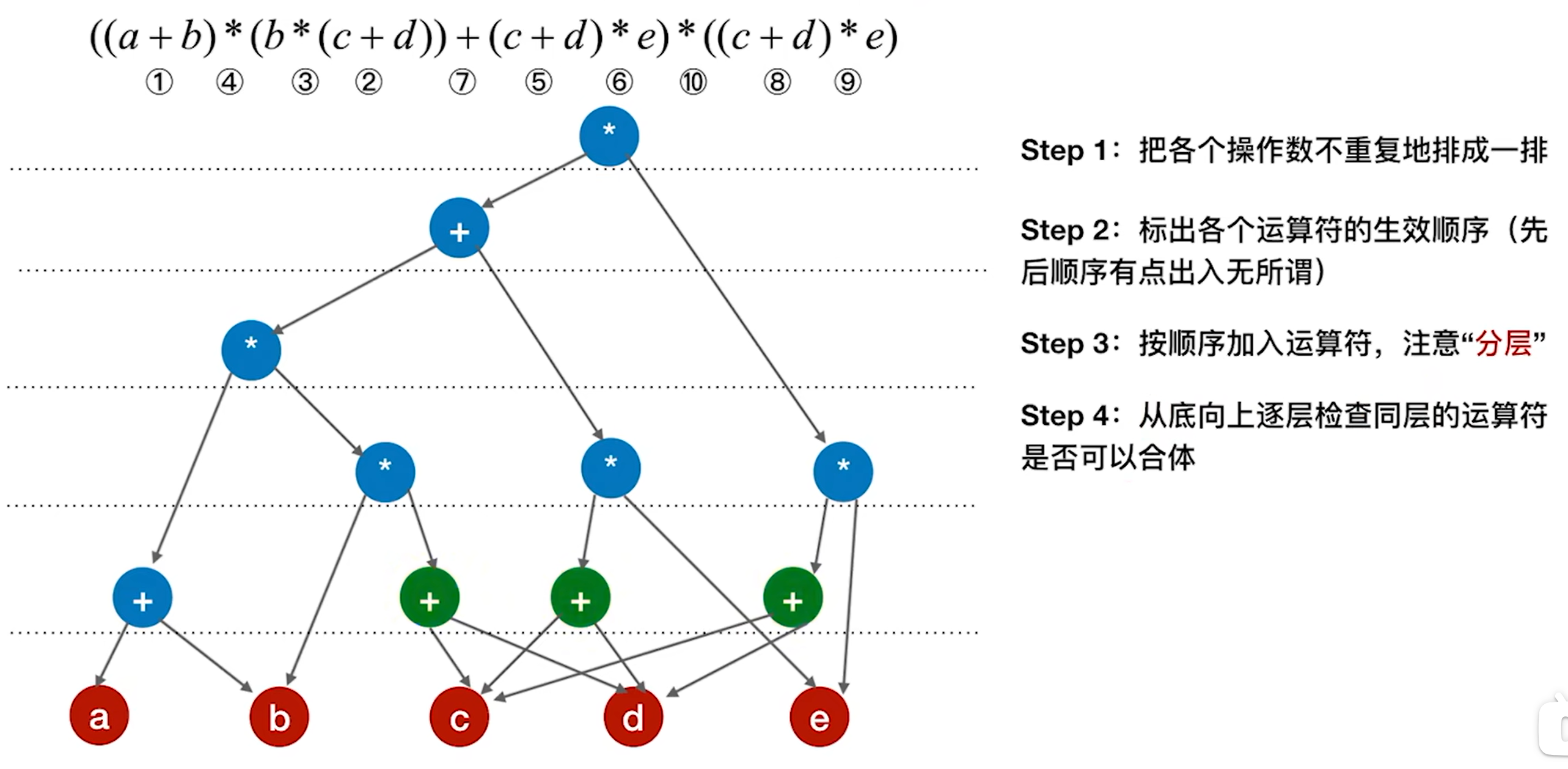
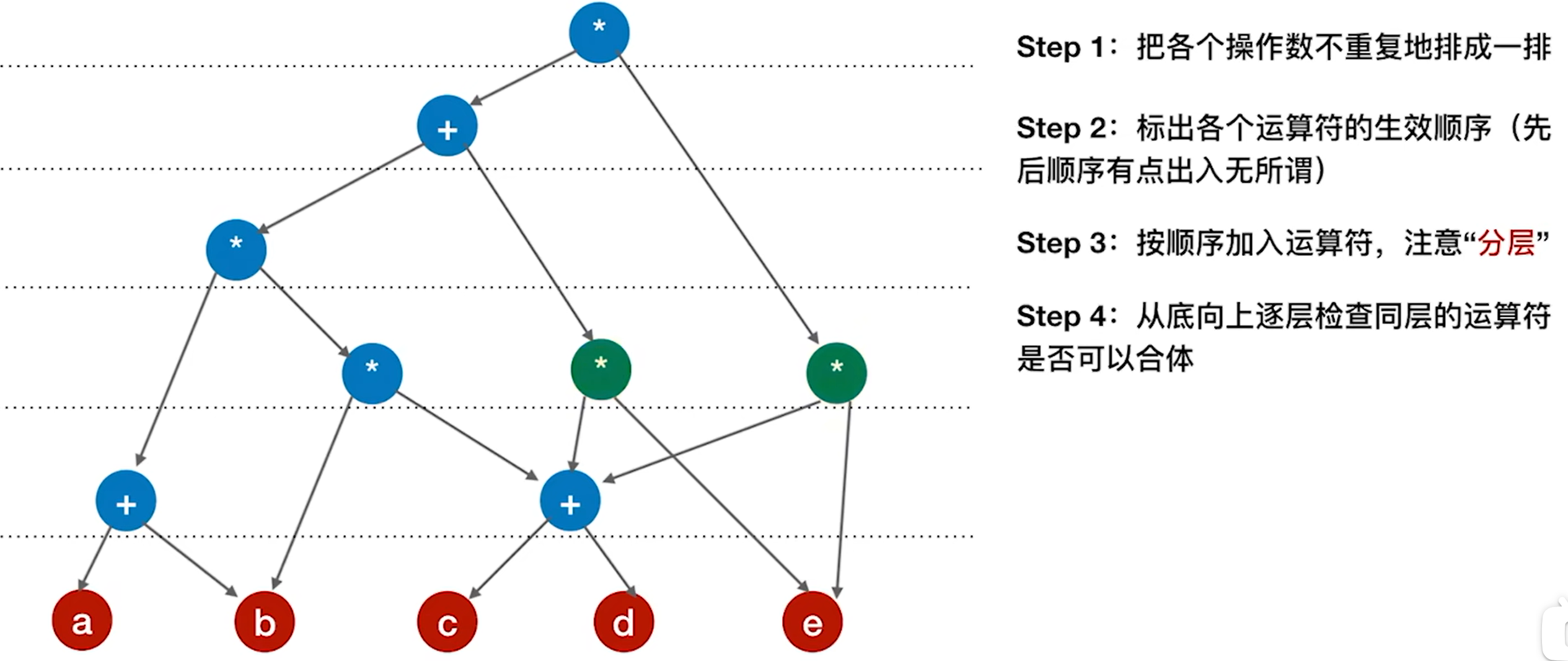
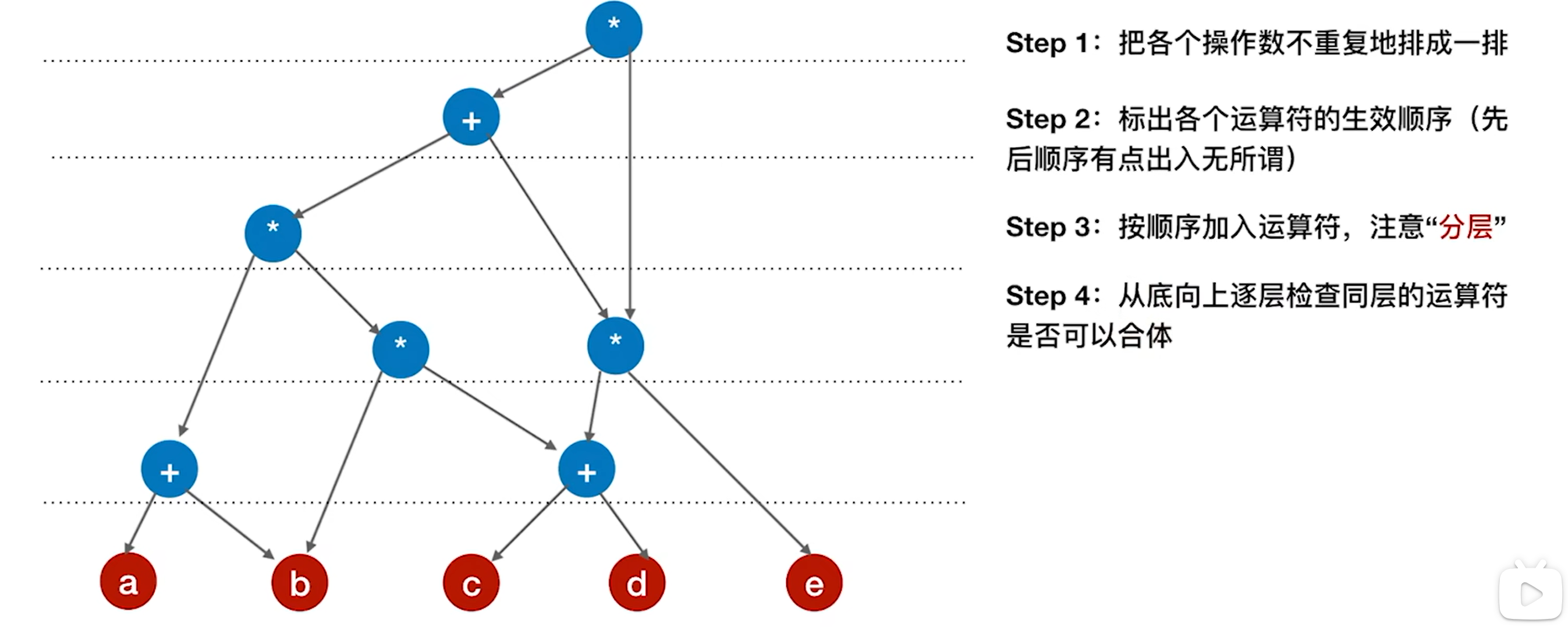
# 有向无环图描述表达式
有向图中不存在环,则称为有向无环图,DAG
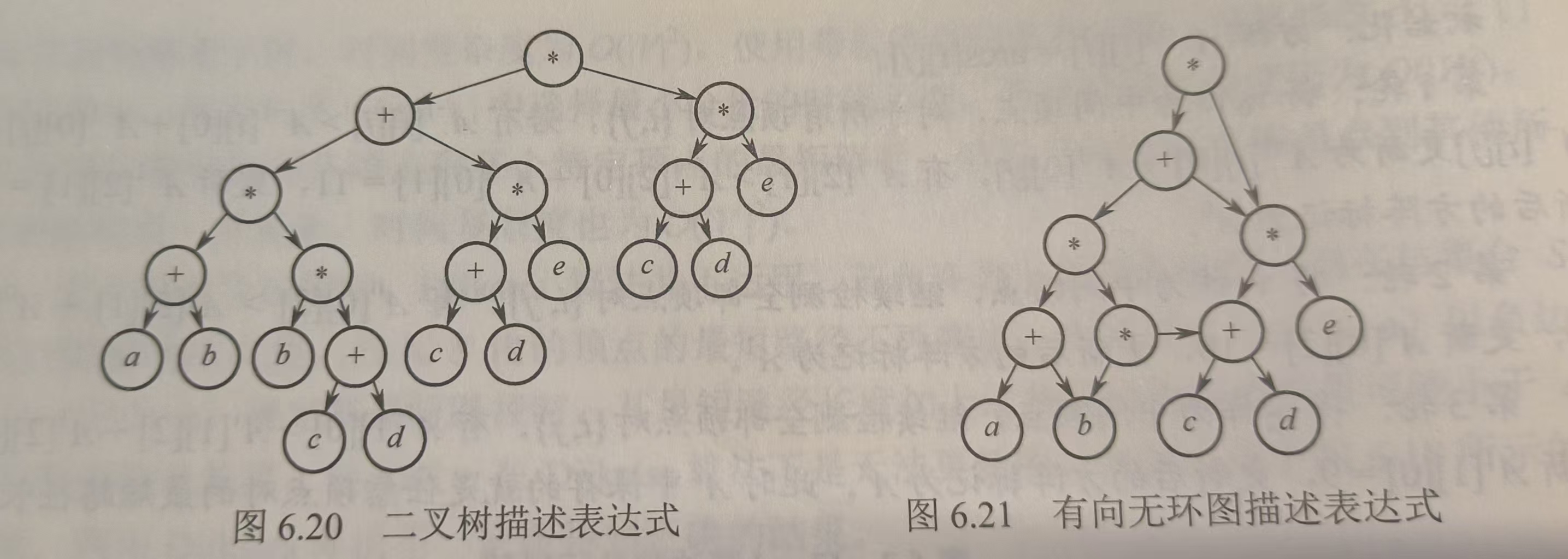
先用树表示,然后把能合并的合并到一起,得到一个有向无环图
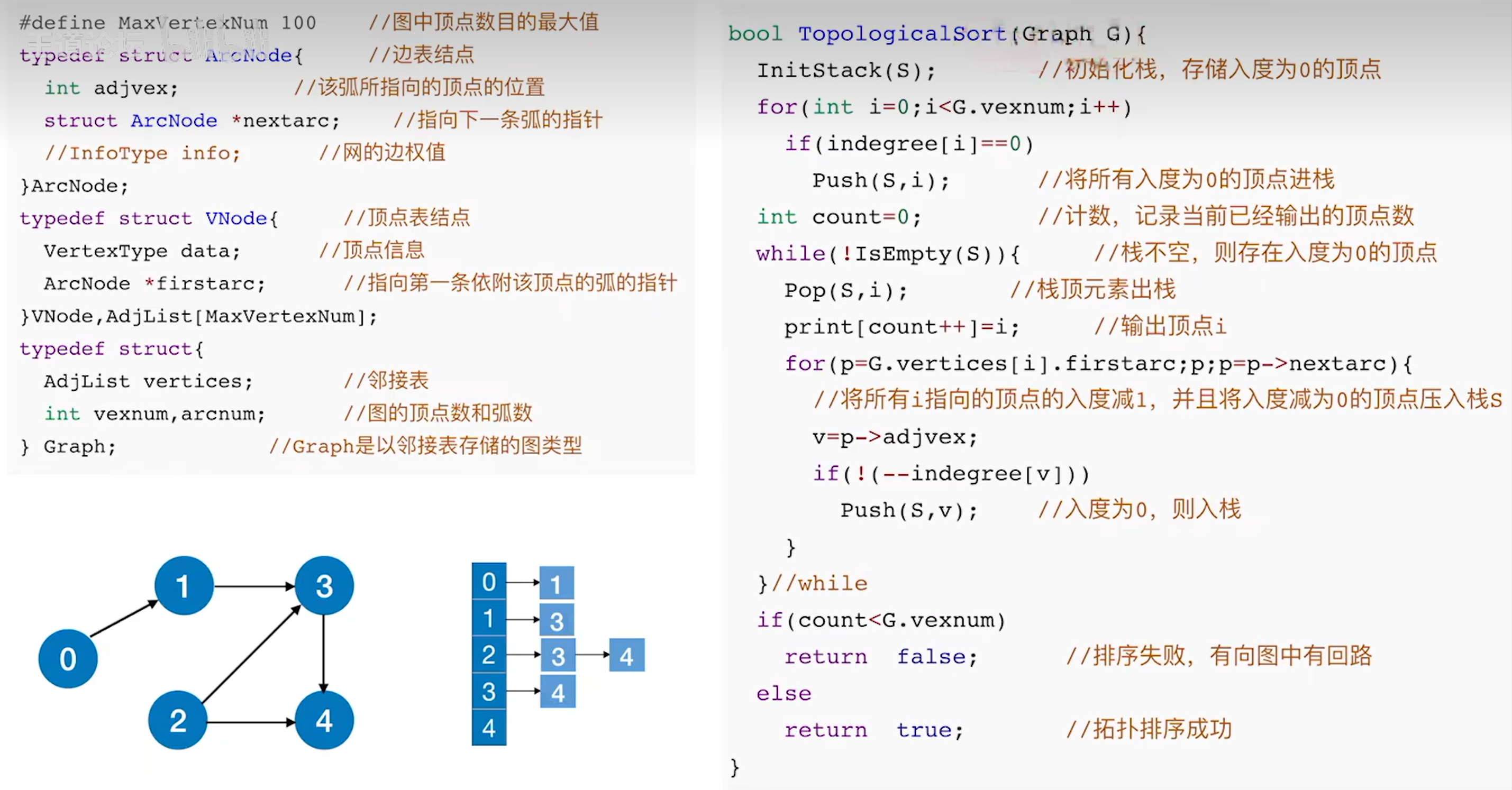
# 拓扑排序
AOV 图顶点表示活动,边表示活动间的依赖关系
- 拓扑排序
当且仅当一个有向图为有向无环图(directed acyclic graph,或称 DAG)时,才能得到对应于该图的拓扑排序。每一个有向无环图都至少存在一种拓扑排序。
方法:不断寻找入度为 0 的节点 pop 出去,删除该节点和相关的边
采用邻接表时,时间复杂度为,采用邻接矩阵时,时间复杂度为
序列不唯一
-
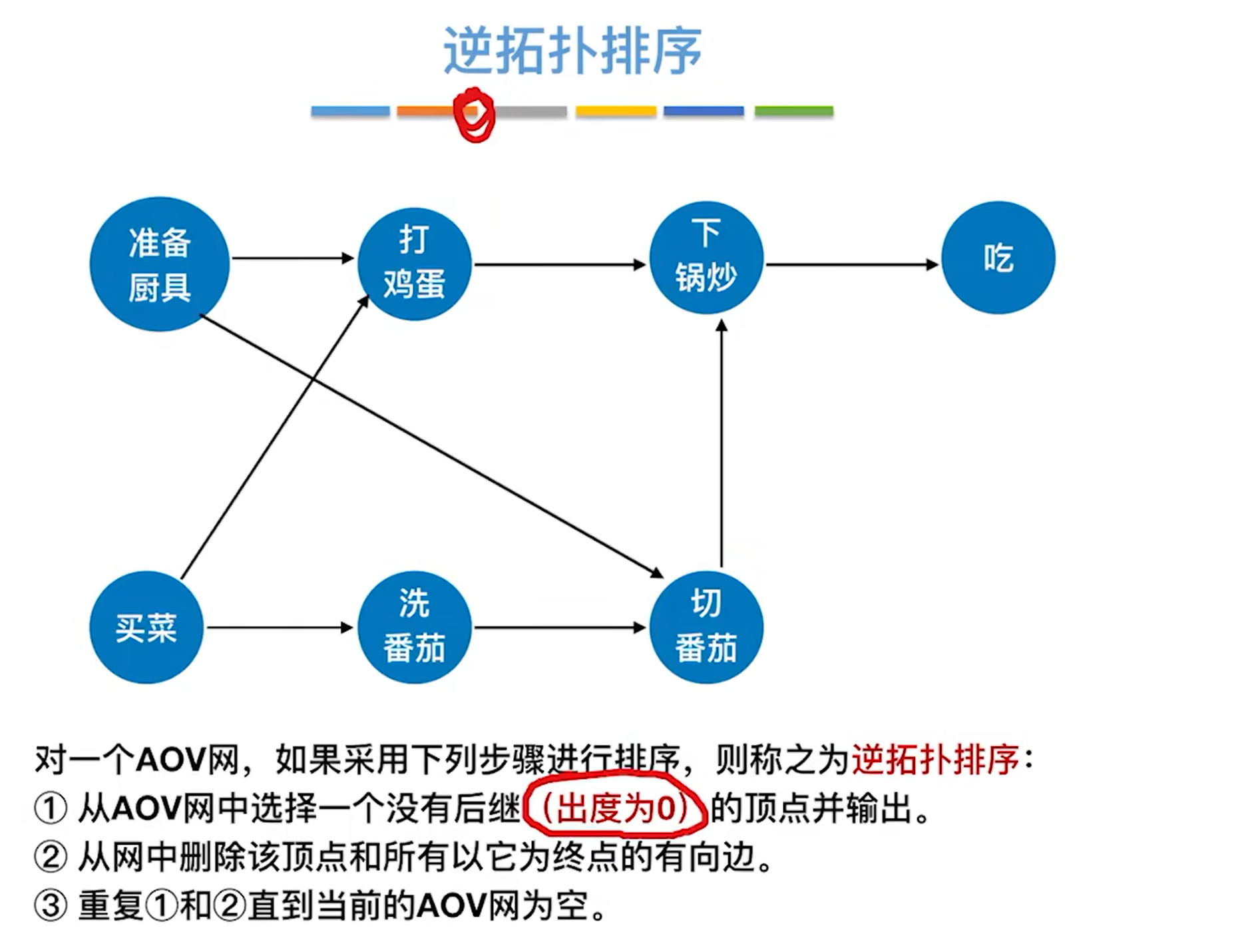
逆拓扑排序
![]()
每次删除出度为 0 的顶点,并把该顶点的邻接点出度减 1
序列不唯一 -
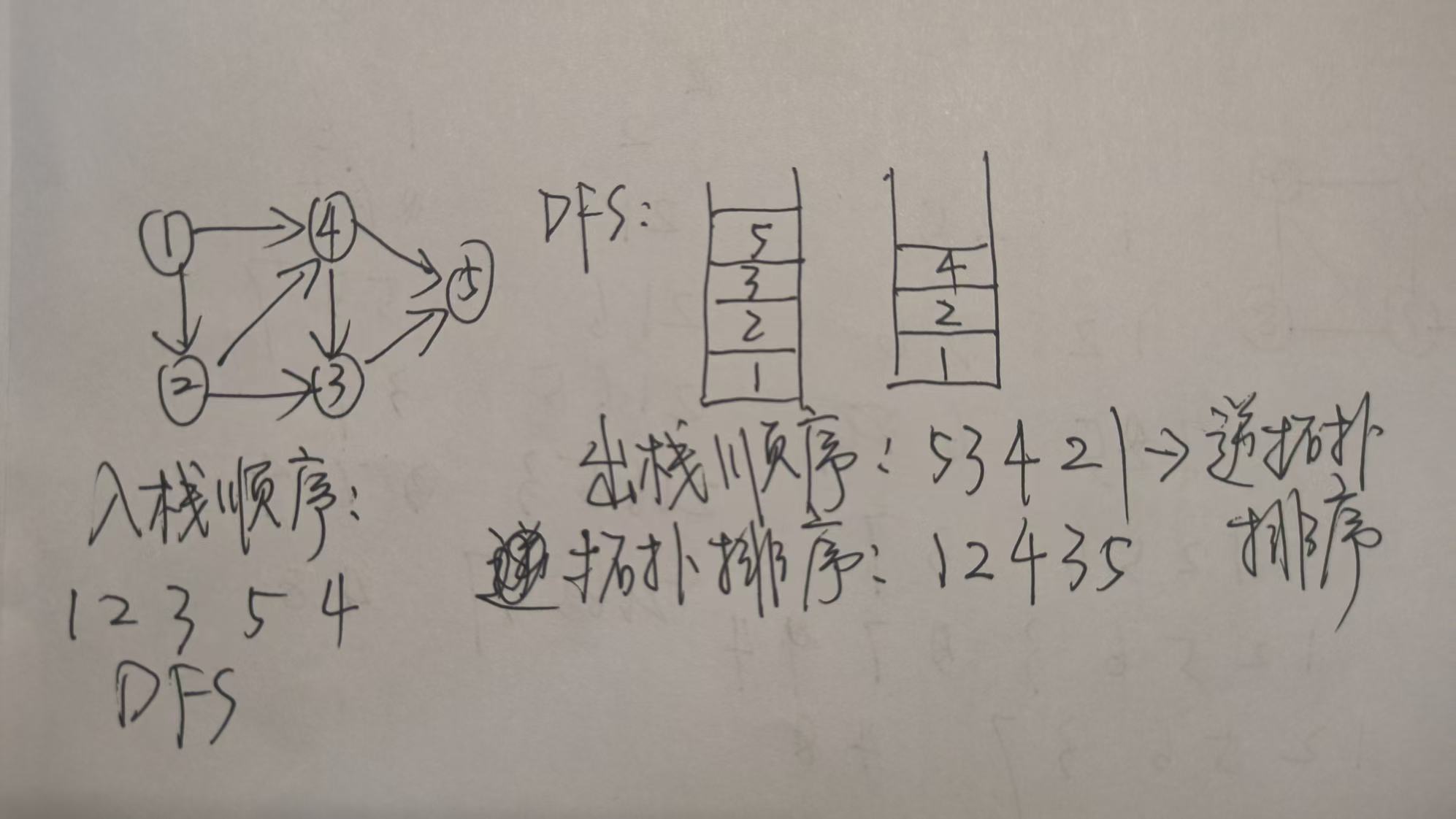
用 dfs 实现拓扑排序
![]()
# AOE 网
边表示活动,顶点表示事件
- 只有在某顶点所代表的事件发生后,从该顶点出发的各有向边所代表的活动才能开始;
- 只有在进入某顶点的各有向边所代表的活动都已结束时,该顶点所代表的事件才能发生(所以事件的最早开始时间要取最大的)
求事件的最早开始时间和最晚完成时间
V 代表事件,a 代表活动
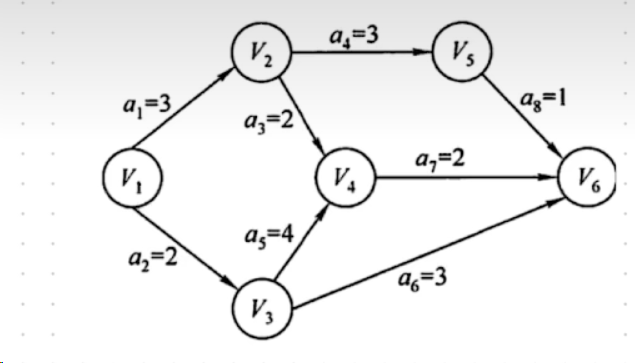
先求事件(V):
| V1 | V2 | V3 | V4 | V5 | V6 | |
|---|---|---|---|---|---|---|
| 最早开始时间 | 0 | 3 | 2 | 6 | 6 | 8 |
| 最晚完成时间 | 0 | 4 | 2 | 6 | 7 | 8 |
最早开始时间从前往后取最大的(V1 填 0,V4 有 V1->V2->V4 和 V1->V3->V4 两条,取大的是 6)
最晚完成时间从后往前推 (用最早开始时间 - a),取最小的(V6 填 8,V5=V6-1,V3 有 V6->V3 和 V6->V4->V3 两条,取最小的 V4-4=2)
最早开始时间 = 最晚完成时间 —— 关键路径
活动(A):
| a1 | a2 | a3 | a4 | a5 | a6 | a7 | a8 | |
|---|---|---|---|---|---|---|---|---|
| 最早开始时间 | 0 | 0 | 3 | 3 | 2 | 2 | 6 | 6 |
| 最晚完成时间 | 1 | 0 | 4 | 4 | 2 | 5 | 6 | 7 |
最早开始时间取箭头的出发点的最早开始时间,最晚完成时间取箭头指向的点的最晚完成时间 - a
最早开始时间 = 最晚完成时间 —— 关键活动
# 各种时间复杂度

