
# 指令选择
找出实现一个给定的 IR Tree 的恰当机器指令序列。Mapping IR into abstract assembly code
- Abstract assembly = assembly with infinite registers
- Invent new temporaries for intermediate results
- Map to actual registers later
Tree pattern, 也叫 tile
本质上是 pattern matching, 我们使用 tree covering 来实现
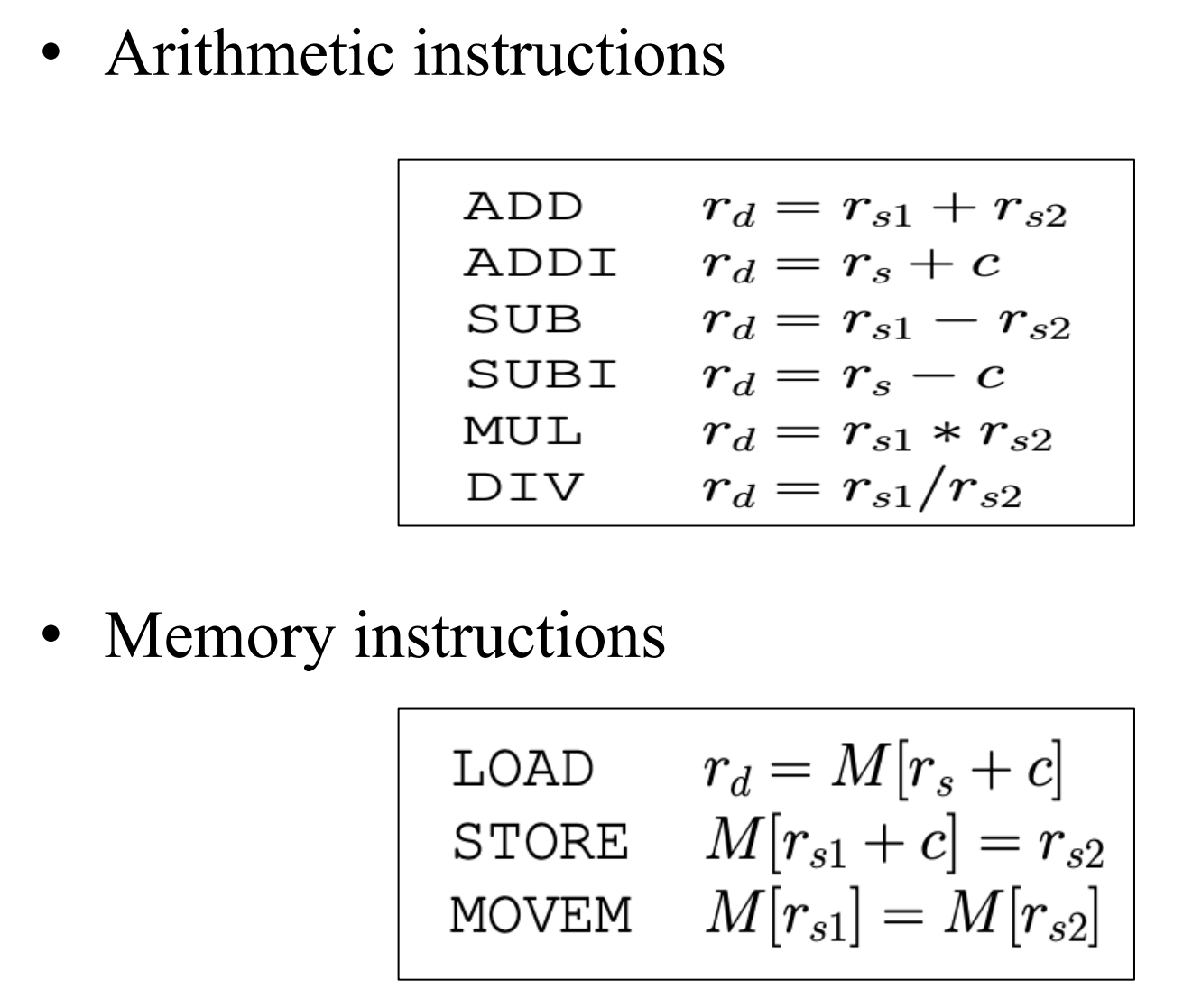
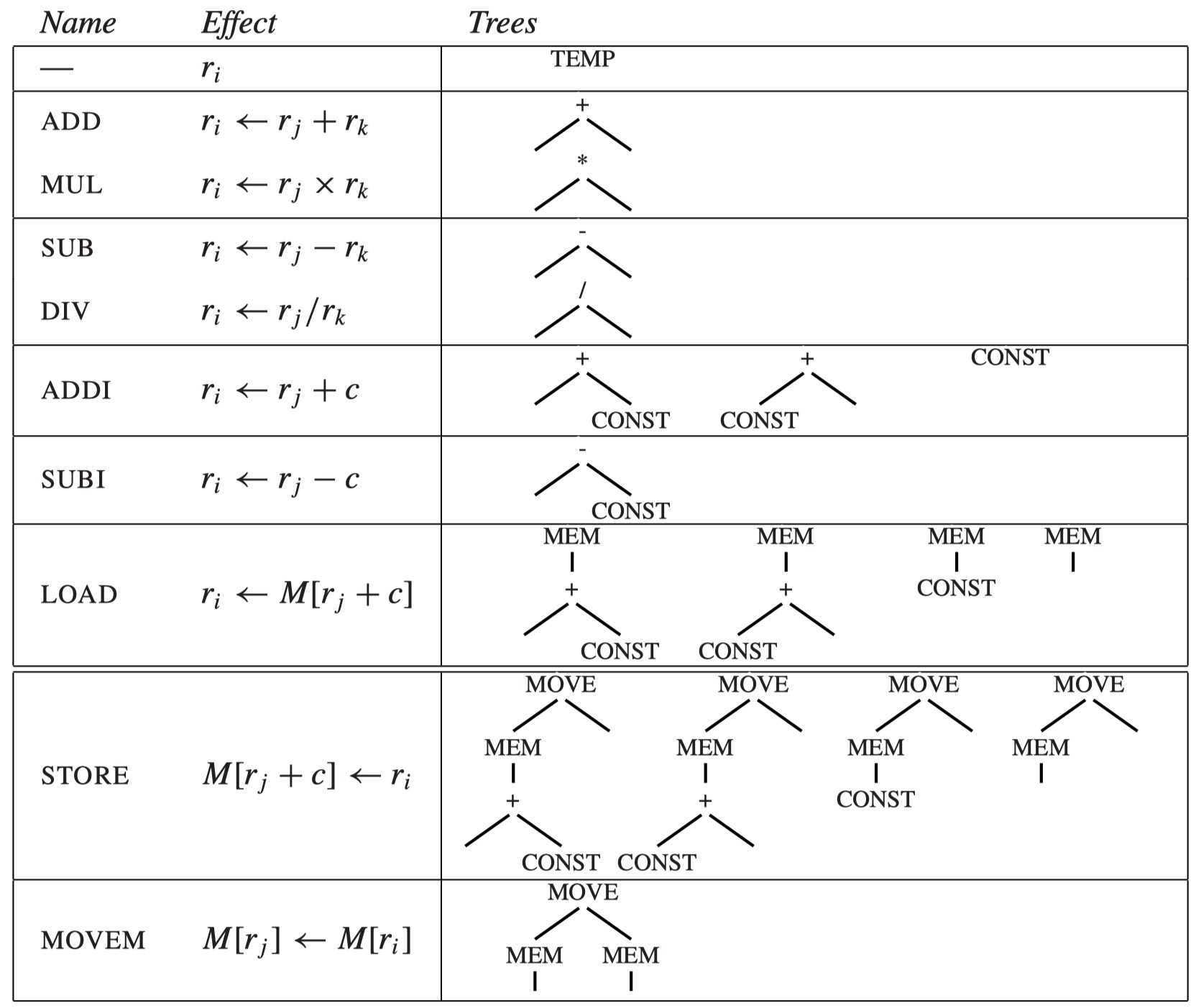
我们 Jouette 体系将树模式映射为指令:
- 寄存器中可以存储数据或地址,每条指令可以访问任意寄存器
- 寄存器 r0 的值永远是 0
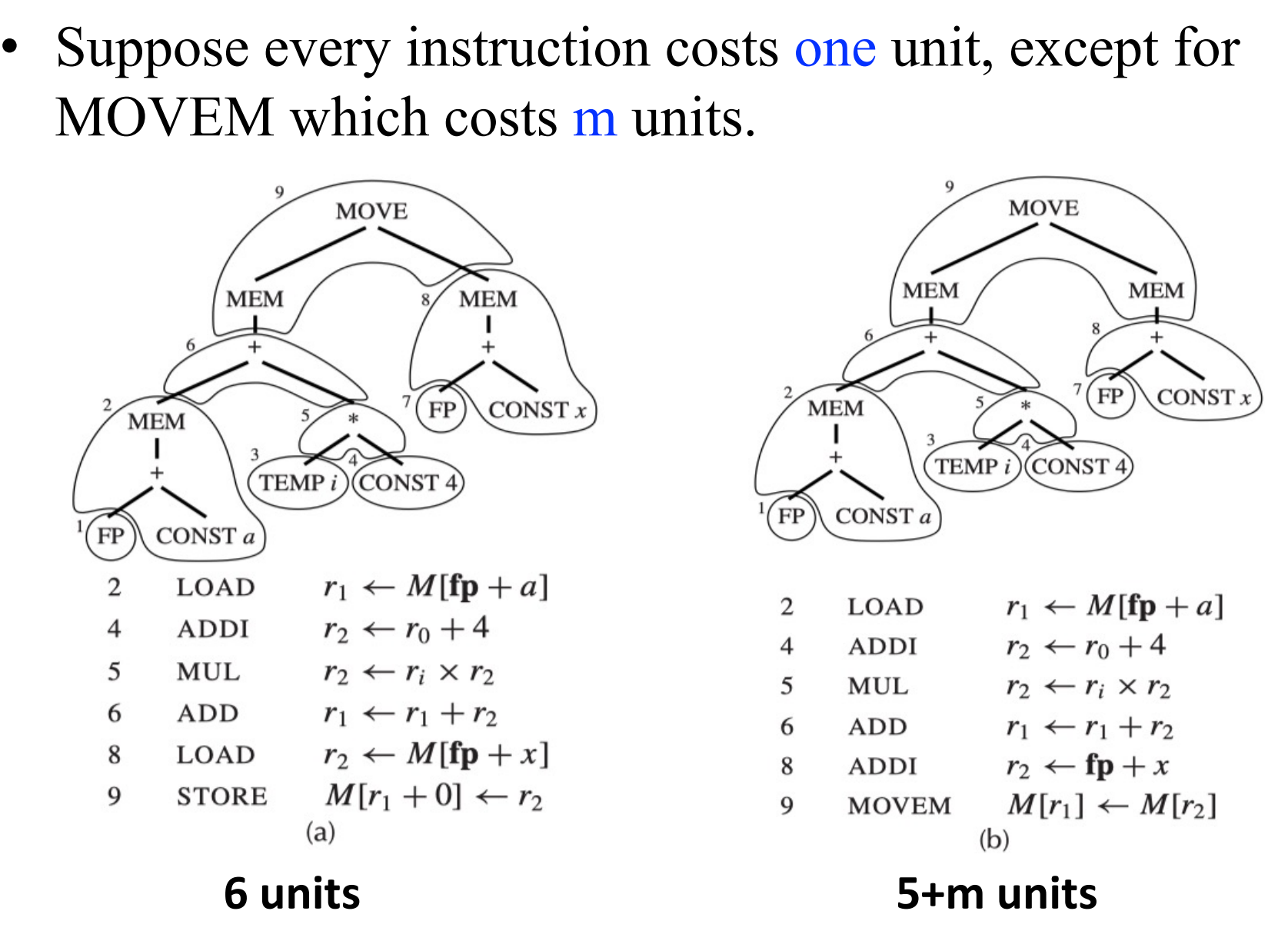
- 每条指令的 latency 都是一周期(除了 MOVEM 的周期是 m)
- 每个周期执行一条指令
将 IR 与后端的机器指令都转换为树结构。这样就把指令选择问题转换为机器指令树覆盖全 IR Tree 的问题。
一棵树可以有多种 tiling 方式
# Optimal Tiling & Optimum Tiling
- Optimum Tiling:使得 tiling 数最少,是全局最优
- Optimal Tiling:No two adjacent tiles can be combined into a single tile of lower cost,是局部最优
一个 optimum tiling 必定是 optimal tiling
![]()
# Algorithms for Instruction Selection
# Maximal Munch: Find an optimal tiling
最大匹配:贪心算法、自顶向下
方法:从 IR 树的根节点开始,用最大的 tile 覆盖当前节点(包含最多节点的),然后在子树中重复此过程
# DP
动态规划:自底向上
方法:
- 递归计算每个子树的最优平铺成本
- 对于每个节点,考虑所有可能的匹配平铺
- 对于每个匹配平铺,计算其成本如下:cost = tile_cost + sum(costs_of_children)
- 选择成本最低的平铺
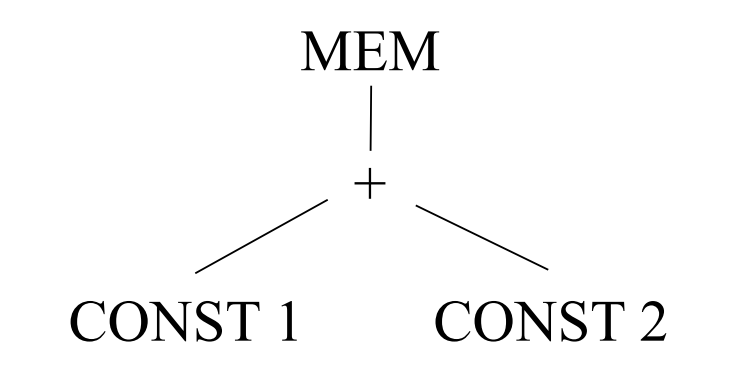
- 对于,它的代价为 1 (ADD r1, r0, i)
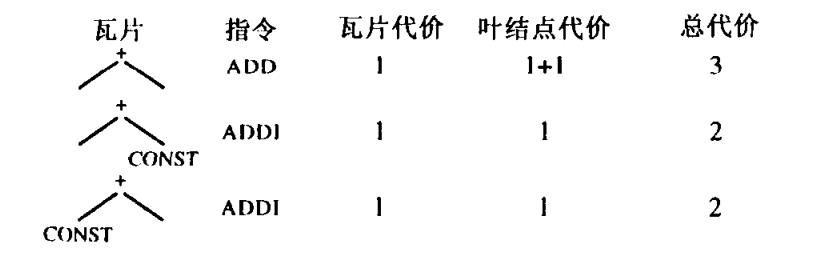
- 对于这棵树,有三种匹配方法
![]()
![]()
因为 2<3,所以我们从 cost=2 的两个任选一个
接下来对于 MEM,用的都是 LOAD,代价都是 1,2<3 所以选 cost=2 的
1 | function Emission(node n): |
# 最大匹配 vs 动态规划
- T - tile 的总种类数
- K - 一个 matching tile 平均覆盖的节点数
- K’ - 需要检查的最大 tile 尺寸(即最大的瓦片包含的节点数)
- T’ - 每个树节点平均能匹配上的 tile 数量
- N - 输入的中间表示 IR Tree 中的总节点数
两种算法的运行时间复杂度:
- 最大匹配(Maximal Munch) - 其时间复杂度与
成正比
- 动态规划(Dynamic Programming) - 其时间复杂度与
成正比
# Tree Grammar 树文法
问题:对于具有复杂指令集和多种寄存器类型及寻址模式的机器,难以使用简单的 tree pattern 和 tiling 算法。
用一种文法来描述 tiles,代替手写过程式匹配代码,支持自动化的指令选择,增强了可移植性
图没看懂,后面再回来研究
